Even in best-case scenarios, a probe to Alpha Centauri or other nearby stars will take decades to reach its target, perhaps centuries. That puts the premium on spacecraft autonomy, an interesting take on which is the ability of machinery to repair itself. Cornell researchers have just announced a milestone in this regard, the creation of a robot that makes copies of itself. Previous self-replicating designs have existed only as computer simulations or were much simpler than Cornell’s new devices.
As reported in the May 12 issue of Nature, the university’s Hod Lipson and colleagues have created machines made up of modular cubes called ‘molecubes.’ Each is identical and contains the computer program that allows it to reproduce. Using electromagnets on their faces, the cubes can adhere to one another selectively; a complete robot is made up of an assembly of such molecubes. And because the cubes are divided, robots composed of them can bend to various angles or manipulate other cubes.
 Thus rebuilding a robot can occur when the machine simply replaces defective modules, tapping a store of such parts. To replicate, a robot would remove its own top cube and add new cubes to it, making a copy of itself, with the new robot assisting in the completion of its own construction. Such flexibility could have immediate benefits for interplanetary missions, such as robotic exploration of the Martian surface, as well as for hazardous environments here on Earth where machines are likely to experience failures.
Thus rebuilding a robot can occur when the machine simply replaces defective modules, tapping a store of such parts. To replicate, a robot would remove its own top cube and add new cubes to it, making a copy of itself, with the new robot assisting in the completion of its own construction. Such flexibility could have immediate benefits for interplanetary missions, such as robotic exploration of the Martian surface, as well as for hazardous environments here on Earth where machines are likely to experience failures.
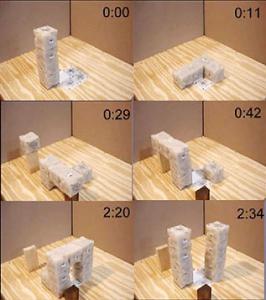
Image: Frames from a video show the replication process. A robot consisting of a stack of four cubes begins by bending over and depositing one of its cubes on the table. The remaining three cubes pick up additional cubes from “feeding stations” and transfer them to the new robot, which assists in the process by standing itself up. Credit: Hod Lipson, Cornell University.
Replication is very much dependent on the environment, tapping power sources in the laboratory and relying on a steady supply of additional modules. But this is true in nature as well, where replication is favored in some contexts more than others. From a Cornell University press release:
…the researchers point out that human beings reproduce but don’t literally self-replicate, since the offspring are not exact copies. And in many cases, the ability to replicate depends on the environment. Rabbits are good replicators in the forest, poor replicators in a desert and abysmal replicators in deep space, they note. “It is not enough to simply say they replicate or even that they replicate well, because these statements only hold in certain contexts,” the researchers conclude.
Lipson’s page on self-replication is here; it contains video of robotic replication and useful links to further information. Lipson sees self-replication as the ultimate form of self-repair, but notes that robots built along these lines will not have designs as targeted as machines designed for a specific task. From his site:
We see that robotic systems are becoming more complex, and in some cases like space exploration, they need to sustain operation for long periods of time without human assistance. If you send a robot to Mars, for example, and it breaks, there is little you can do. But if instead of sending a fixed robot you send a robot with a supply of modules, then that robot may be able to self-repair and even make more and possibly different robots if the mission needs change unexpectedly. Of course, there are many tradeoffs: These robots would not be as optimally designed as a fixed robot for any specific task, and they would be more complex, but maybe overall they would be more robust. We still need to do the exact calculations to see when and where it would be a viable solution.
Centauri Dreams note: As self-replication techniques improve, watch the size of robotic modules begin to shrink. Lipson already talks of using microscale techniques to create systems with thousands of modules, an early stage in the robotic self-evolution that may emerge as an enabler for interstellar probes.
The paper is Victor Zykov, Efstathios Mytilinaios, et al., “Robotics: Self-Reproducing Machines,” Nature 435, 163-164 (12 May 2005). For background, see Lipson and Jordan Pollack’s work on the Golem Project, which explored artificial evolution and 3-D printing for robots that were unable to self-reproduce. Wedding Golem’s methods with the self-reproduction of the current work is high on Lipson’s list of priorities. Video is available here.

Shape Shifting Robot Can Reassemble After Crashing Apart
Written by Nancy Atkinson
It’s fairly certain that the Mars Polar Lander and the Beagle lander crash landed on Mars, never to be heard from again. Well, what if crash landing was no problem? What if a robotic spacecraft could just reassemble and fix itself if there was a mishap on the way to another planet’s surface? That type of science fiction is getting closer to reality.
A group of researchers from the University of Pennsylvania have developed a robot made of separate modules that can recognize each other and reassemble itself if they crash or get kicked apart. Maybe this could solve the problems of landing on Mars!
Except we haven’t figured out how to reassemble people, yet.
Full article plus video here:
http://www.universetoday.com/2008/04/30/shape-shifting-robot-can-reassemble-after-crashing-apart/