Early probes are one thing, but can we build a continuing presence among the stars, human or robotic? An evolutionary treatment of starflight sees it growing from a steadily expanding presence right here in our Solar System, the kind of infrastructure Alex Tolley examines in the essay below. How we get to a system-wide infrastructure is the challenge, one analyzed by a paper that sees artificial intelligence and 3D printing as key drivers leading to a rapidly expanding space economy. The subject is a natural for Tolley, who is co-author (with Brian McConnell) of A Design for a Reusable Water-Based Spacecraft Known as the Spacecoach (Springer, 2016). An ingenious solution to cheap transportation among the planets, the Spacecoach could readily be part of the equation as we bring assets available off-planet into our economy and deploy them for even deeper explorations. Alex is a lecturer in biology at the University of California, and has been a Centauri Dreams regular for as long as I can remember, one whose insights are often a touchstone for my own thinking.
by Alex Tolley

Crewed starflight is going to be expensive, really expensive. All the various proposed methods from slow world ships to faster fusion vessels require huge resources to build and fuel. Even at Apollo levels of funding in the 1960’s, an economy growing at a fast clip of 3% per year is estimated to need about half a millennium of sustained growth to afford the first flights to the stars. It is unlikely that planet Earth can sustain such a sizable economy that is millions of times larger than today’s. The energy use alone would be impossible to manage. The implication is that such a large economy will likely be solar system wide, exploiting the material and energy resources of the system with extensive industrialization.
Economies grow by both productivity improvements and population increases. We are fairly confident that Earth is likely nearing its carrying capacity and certainly cannot increase its population even 10-fold. This implies that such a solar system wide economy will need huge human populations living in space. The vision has been illustrated by countless SciFi stories and perhaps popularized by Gerry O’Neill who suggested that space colonies were the natural home of a space faring species. John Lewis showed that the solar system has immense resources to exploit that could sustain human populations in the trillions.

Image credit: John Frassanito & Associates
But now we run into a problem. Even with the most optimistic estimates of reduced launch costs, and assuming people want to go and live off planet probably permanently, the difficulties and resources needed to develop this economy will make the US colonization by Europeans seem like a walk in the park by comparison. No doubt it can be done, but our industrial civilization is little more than a quarter of a millennium old. Can we sustain the sort of growth we have had on Earth for another 500 years, especially when it means leaving behind our home world to achieve it? Does this mean that our hopes of vastly larger economies, richer lives for our descendents and an interstellar future for humans is just a pipe dream, or at best a slow grind that might get us there if we are lucky?
Well, there may be another path to that future. Philip Metzger and colleagues have suggested that such a large economy can be developed. More extraordinary, that such an economy can be built quickly and without huge Earth spending, starting and quickly ending with very modest space launched resources. Their suggestion is that the technologies of AI and 3D printing will drive a robotic economy that will bootstrap itself quickly to industrialize the solar system. Quickly means that in a few decades, the total mass of space industrial assets will be in the millions of tonnes and expanding at rates far in excess of our Earth-based economies.
The authors ask, can we solve the launch cost problem by using mostly self-replicating machines instead? This should remind you of the von Neumann replicating probe concept. Their idea is to launch seed factories of almost self-replicating robots to the Moon. The initial payload is a mere 8 tonnes. The robots will not need to be fully autonomous at this stage as they can be teleoperated from Earth due to the short 2.5 second communication delay. They are not fully self-replicating at this stage as need for microelectronics is best met with shipments from Earth. Almost complete self-replication has already been demonstrated with fabs, and 3D printing promises to extend the power of this approach.
The authors assume that initial replication will neither be fully complete, nor high fidelity. They foresee the need for Earth to ship the microelectronics to the Moon as the task of building fabs is too difficult. In addition, the materials for new robots will be much cruder than the technology earth can currently deliver, so that the next few generations of robots and machinery will be of poorer technology than the initial generation. However the quality of replication will improve with each generation and by generation 4, a mere 8 years after starting, the robot technology will be at the initial level of quality, and the industrial base on the Moon should be large enough to support microelectronics fabs. From then on, replication closure is complete and Earth need ship no further resources to the Moon.
| Gen | Human/Robotic Interaction | Artificial Intelligence | Scale of Industry | Materials Manufactured | Source of Electronics |
|---|---|---|---|---|---|
| 1.0 | Teleoperated and/or locally operated by a human outpost | Insect-like | Imported, small-scale, limited diversity | Gases, water, crude alloys, ceramics, solar cells | Import fully integrated machines |
| 2.0 | Teleoperated | Lizard-like | Crude fabrication, inefficient, but greater throughput than 1.0 | (Same) | Import electronics boxes |
| 2.5 | Teleoperated | Lizard-like | Diversifying processes, especially volatiles and metals | Plastics, rubbers, some chemicals | Fabricate crude components plus import electronics boxes |
| 3.0 | Teleoperated with experiments in autonomy | Lizard-like | Larger, more complex processing plants | Diversify chemicals, simple fabrics, eventually polymers | Locally build PC cards, chassis and simple components, but import the chips |
| 4.0 | Closely supervised autonomy | Mouse-like | Large plants for chemicals, fabrics, metals | Sandwiched and other advanced material processes | Building larger assets such as lithography machines |
| 5.0 | Loosely supervised autonomy | Mouse-like | Labs and factories for electronics and robotics. Shipyards to support main belt. | Large scale production | Make chips locally. Make bots in situ for export to asteroid belt. |
| 6.0 | Nearly full autonomy | Monkey-like | Large-scale, self-supporting industry, exporting industry to asteroid main belt | Makes all necessary materials, increasing sophistication | Makes everything locally, increasing sophistication |
| X.0 | Autonomous robotics pervasive throughout Solar System enabling human presence | Human-like | Robust exports/imports through zones of solar system | Material factories specialized by zone of the Solar System | Electronics factories in various locations |
Table 1. The development path for robotic space industrialization. The type of robots and the products created are shown. Each generation takes about 2 years to complete. Within a decade, chip fabrication is initiated. By generation 6, full autonomy is achieved.
| Asset | Qty. per set | Mass minus Electronics (kg) | Mass of Electronics (kg) | Power (kW) | Feedstock Input (kg'hr) | Product Output (kg/hr) |
|---|---|---|---|---|---|---|
| Power Distrib & Backup | 1 | 2000 | ----- | ---- | ---- | ---- |
| Excavators (swarming) | 5 | 70 | 19 | 0.30 | 20 | ---- |
| Chem Plant 1 - Gases | 1 | 733 | 30 | 5.58 | 4 | 1.8 |
| Chem Plant 2 - Solids | 1 | 733 | 30 | 5.58 | 10 | 1.0 |
| Metals Refinery | 1 | 1019 | 19 | 10.00 | 20 | 3.15 |
| Solar Cell Manufacturer | 1 | 169 | 19 | 0.50 | 0.3 | ---- |
| 3D Printer 1 - Small Parts | 4 | 169 | 19 | 5.00 | 0.5 | 0.5 |
| 3D Printer 2 - Large Parts | 4 | 300 | 19 | 5.00 | 0.5 | 0.5 |
| Robonaut assemblers | 3 | 135 | 15 | 0.40 | ---- | ---- |
| Total per Set | ~7.7 MT launched to Moon | 64.36 kW | 20 kg regolith/hr | 4 kg parts/hr |
||
Table 2. The products and resources needed to bootstrap the industrialization of the Moon with robots. Note the low mass needed to start, a capability already achievable with existing technology. For context, the Apollo Lunar Module had a gross mass of over 15 tonnes on landing.
The authors test their basic model with a number of assumptions. However the conclusions seem robust. Assets double every year, more than an order of magnitude faster than Earth economic growth.
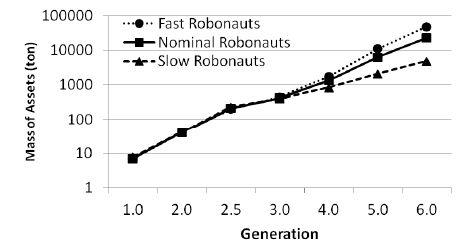
Figure 13 of the Metzger paper shows that within 6 generations, about 12 years, the industrial base off planet could potentially be pushing towards 100K MT.
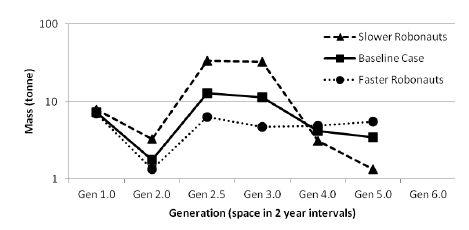
Figure 14 of the paper shows that with various scenarios for robots, the needed launch masses from Earth every 2 years is far less than 100 tonnes and possibly below 10 tonnes. This is quite low and well within the launch capabilities of either government or private industry.
Once robots become sophisticated enough, with sufficient AI and full self-replication, they can leave the Moon and start industrializing the asteroid belt. This could happen a decade after initiation of the project.
With the huge resources that we know to exist, robot industrialization would rapidly, within decades not centuries, create more manufactures by many orders of magnitude than Earth has. Putting this growth in context, after just 50 years of such growth, the assets in space would require 1% of the mass of the asteroid belt, with complete use within the following decade. Most importantly, those manufactures, outside of Earth’s gravity well, require no further costly launches to transmute into useful products in space. O’Neill colonies popped out like automobiles? Trivial. The authors suggest that one piece could be the manufacture of solar power satellites able to supply Earth with cheap, non-polluting power, in quantities suitable for environmental remediation and achieving a high standard of living for Earth’s population.
With such growth, seed factories travel to the stars and continue their operation there, just as von Neumann would predict with his self-replicating probes. Following behind will be humans in starships, with habitats already prepared by their robot emissaries. All this within a century, possibly within the lifetime of a Centauri Dreams reader today.
Is it viable? The authors believe the technology is available today. The use of telerobotics staves off autonomous robots for a decade. In the 4 years since the article was written, AI research has shown remarkable capabilities that might well increase the viability of this aspect of the project. It will certainly need to be ready once the robots leave the Moon to start extracting resources in the asteroid belt and beyond.
The vision of machines doing the work is probably comfortable. It is the fast exponential growth that is perhaps new. From a small factory launched from Earth, we end up with robots exploiting resources that dwarf the current human economy within a lifetime of the reader.
The logic of the model implies something the authors do not explore. Large human populations in space to use the industrial output of the robots in situ will need to be launched from Earth initially. This will remain expensive unless we are envisaging the birthing of humans in space, much as conceived for some approaches to colonizing the stars. Alternatively an emigrant population will need to be highly reproductive to fill the cities the robots have built. How long will that take? Probably far longer, centuries, rather than the decades of robotic expansion.
Another issue is that the authors envisage the robots migrating to the stars and continuing their industrialization there. Will humans have the technology to follow, and if so, will they continue to fall behind the rate at which robots expand? Will the local star systems be full of machines, industriously creating manufactures with only themselves to use them? And what of the development of AI towards AGI, or Artificial General Intelligence? Will that mean that our robots become the inevitable dominant form of agency in the galaxy?
The paper is Metzger, Muscatello, Mueller & Mantovani, “Affordable, Rapid Bootstrapping of the Space Industry and Solar System Civilization,” Journal of Aerospace Engineering Volume 26 Issue 1 (January 2013). Abstract / Preprint.


Tim Peake did some remote driving from orbit, so it is feasible.
http://blogs.esa.int/tim-peake/2016/03/15/space-to-ground-remote/
If you can access the BBCs iplayer in the UK, this week’s episode of “The Click” has a segment on robots in space. Check out the robot that will use QR-like codes to navigate and manipulate objects. No demo, but the idea is one way to make autonomous robots able to do useful work.
http://www.bbc.co.uk/iplayer/episode/b08cgrst/click-space-special
Not much is being said about unforeseen problems. Just because we don’t foresee them does not mean they won’t show up, and preparations for trying to deal with them have to be made.
Tthat means having people there or having very capable tele-operated robots. The robots would likely be cheaper to have on hand and, as we learn more, well-outfitted brains could be added and they’d be needed in places humans couldn’t survive. So it’s economical to put a lot of effort into developing robots that can fit into tight spots, can survive a lot, and can manipulate both small, fine things and massive things.
Unforeseen is unforeseen, and could result in mission failure. As we’ve seen with spacecraft throughout history, failure really is an option. Then we have to try again. Having people there might make it easier to solve some problems, but it adds many more problems of its own, including possible deaths. Seems to me its better to work the bugs out with several generations of cheaper robotic missions.
We keep getting ahead of ourselves. The obvious first steps are: 1) a fully reusable launch system to deliver payloads to LEO cheaply and safely, 2) a fully reusable system or systems to take goods and people from LEO to LLO (Low Lunar Orbit) and back, 3) a fully reusable Lunar Lander to round trip goods and people from the Lunar surface to LLO and back. Now we’re ready to develop lunar resources.
My scenario would be somewhat different:
– A new set of public-private programs fund companies to develop a cis-lunar transportation system.
– Partially-reusable Falcon Heavy (FH-PR) delivers telerobotic ice-harvesting robots to the lunar poles.
– Those robots harvest and process enough propellant from ice to refuel the lander.
– Now the landers / ferries can retrieve nearly three times the payload for each FH-PR launch making it more capable than even the SLS Block 2 for missions to the Moon.
– With multiple flights the redundancy of the ice-harvesting system and spares are built up, a large, inflatable habitat and supplies are emplaced, and the ferry is human-rated.
– Telerobots push regolith on top of the habitat before it is inflated.
– Crew arrive and stay for extended periods using an indoor centrifuge providing a full gee for 2 X 2 hours a day. They repair the worn spare sparts and produce bulky metal parts from micrometeorite bits in the regolith.
– The crew sets up another habitat serving as an International Lunar Research Facility. The company crew produce propellant for the lander to serve as a suborbital hopper. Astronauts from many nations conduct their own “Apollo programs” at low cost.
– The high flight rate, reusable lander / ferry, in-situ propellant production lowers the cost of access to the Moon to the point where wealthy retirees can move to the Moon thereby starting settlement.
– Fully reusable launchers come when they come and lower the cost considerably when they do. But everything else moves forward even before that happens.
“NASA experiments show how astronaut’s genes changed in space”
DNA.
For NASA astronaut Scott Kelly, his year spent living and working on the International Space Station made him more of an environmentalist and gave him a view of our planet that most people will never see in person.
But beyond those shifts in perspective, Kelly’s body may have changed in other ways.
SEE ALSO: This astronaut just spent 340 days in space. Here’s why it was worth it.
According to preliminary data released by NASA, Kelly’s genes, fine motor skills, microbiome and other aspects of his body were altered during the 340 days he spent in orbit from 2015 to 2016.
Using Kelly’s data to get to Mars
Living in space for one year can change a lot about a person, including their DNA.
For NASA astronaut Scott Kelly, his year spent living and working on the International Space Station made him more of an environmentalist and gave him a view of our planet that most people will never see in person.
But beyond those shifts in perspective, Kelly’s body may have changed in other ways.
SEE ALSO: This astronaut just spent 340 days in space. Here’s why it was worth it.
According to preliminary data released by NASA, Kelly’s genes, fine motor skills, microbiome and other aspects of his body were altered during the 340 days he spent in orbit from 2015 to 2016.
Using Kelly’s data to get to Mars
Learning more about how a long trip to space affected Kelly is particularly important because NASA is aiming to send humans to Mars in the next two decades, a mission that would require astronauts to live in the weightlessness of space for several months while traveling to and from the red planet’s surface.
One experiment, which was performed when Kelly and his year-in-space partner Russian cosmonaut Mikhail Kornienko got back to Earth, simulated various tasks astronauts may have to perform when they first arrive on Mars
Kelly and Kornienko appeared to have the hardest time with tasks involving “postural control and stability and muscle dexterity,” according to a NASA statement. This makes sense if you think about it: The two Space Station crewmembers were living in weightlessness for nearly a year. After that, you probably wouldn’t exactly have the best core strength either.
This also follows the results of another experiment, which showed that the fine motor skills of the crewmembers may be impacted by long stays in space, meaning that it’s possible astronauts traveling to another world will have trouble using computers after such long trips, NASA said.
https://www.yahoo.com/news/nasa-experiments-show-astronaut-genes-230541366.html
The effects were caused by zero gravity, not “space”. A proper Mars transport will not be zero gravity, but generate “artificial” gravity through rotation. The intergalactic radiation is more difficult to counter but we have approaches that should work. Unfortunately, NASA has not tested any work arounds at the ISS, so no progress can be reported.
A new article on why we will need AI in space exploration, the areas it will be needed in, and how we can go about it:
https://www.linkedin.com/pulse/artificial-intelligence-space-exploration-david-vivancos
To quote:
Reaching Space is one of these elusive endeavors, with a great burden due to the cost to lift a pound or kg there. We must remember that to date less than 500 people have flown there.
It is true that private space access is rising, and will be a reality thanks to Elon Musk, Burt Rutan, Jeff Bezos and others, but we still need to go beyond reusing a rocket to really dropping the cost to lift a kg to space to regular airline figures.
How can we change this? , my first approach 12 years ago, was through the use of Nanotechnology, I even build a startup with that in mind and invest a lot of money and time researching in that space. But the truth is that I haven’t been able to test my research yet, because the environment was, and still is not ready, even with current advances in graphene.
So we need to look at different alternatives. My view is that AI will be key in going from simulation over human premises to simulation over all the spectrum of possibilities, we need to have AI’s that “think” beyond what we humans are capable of.
The new materials research must be conducted by AI if we want to go faster , the rocket equation is what it is, but to find the cheapest combination of materials that could work is something where AI could be key, to speed up things.
At the end what we need to build is basically AI scientists.
We as humans have trouble visualizing and working with more than 3 dimensions, on the contrary AI can deal with millions or billions of them, when I say dimension I am referring to the underlying structure that every problem to solve has.
I have no doubt that AI can help with design, but so far no AI is as creative a designer as a human. It will be humans that come up with novel approaches, and the profit motive that will drive down costs until access to space is much, much lower. Reusability is key and both SpaceX and Blue Origin have taken that approach seriously.
I agree with Alex. We understand how to build reusable space systems. AI will probably be of little help. The problem has been, and continues to be, lack of resources. Unfortunately, NASA is focused on flags and footprints, so work on reusable launchers stopped about 1996. Musk and Bezos have taken baby steps towards cheap access to orbit, and bless them, they may get there some day.
Forget about mining water at the poles. 86% of rocket propellant is liquid oxygen, and oxygen is abundant anywhere on the moon. Why use up the precious water when our lunar descendants are going to need it someday? We can easily ship the 14% from earth (or from the asteroids).