Approaching problems from new directions can be unusually productive, something I always think of in terms of Mason Peck’s ideas on using Jupiter as a vast accelerator to drive a stream of micro-spacecraft (Sprites) on an interstellar mission. Now Peck, working with Robert Shepherd (both are at Cornell University) is proposing a new kind of rover, one ideally suited for Europa. The idea, up for consideration at the NASA Innovative Advanced Concepts (NIAC) program, is once again to exploit a natural phenomenon in place of a more conventional technology. What Peck and Shepherd have in mind is the use of ‘soft robotics’ — autonomous machines made of low-stiffness polymers or other such material — to exploit local energy beneath Europa’s ice.
We’re at the edge of a new field here, with soft robotics advocates using principles imported from more conventional rigid robot designs to work with pliable materials in a wide range of applications, some of which tie in with the growth in 3D printing. The people working in this area are developing applications for everything from physical therapy to minimally invasive surgery, with energizing inputs from organic chemistry and soft materials science. If the average robot is modeled around metallic structures with joints based on conventional bearings, soft robotics looks to the natural world for models of locomotion through terrain and innovative methods of energy production.
Peck and Shepherd are proposing what they call a ‘soft-robotic rover with electromagnetic power scavenging,’ a device capable of moving in the seas of Europa that is anything but the submarine-like craft some have envisioned to do the job. The closest analog in the natural world is the lamprey eel, the soft robotics version of which would use electrodynamic tethers to scavenge energy. The rover moves by swimming, powered not by solar or nuclear power but by the use of expanding gases. The rover under the ice sends data to a Europa orbiter using VLF wavelengths, like a submarine. Let me quote from the NIAC proposal on this mechanism:
The electrical energy scavenged from the environment powers all rover subsystems, including one that electrolyzes H2O. Electrolysis produces a mixture of H2 and O2 gas, which is stored internally in the body and limbs of this rover. Igniting this gas expands these internal chambers, causing shape change to propel the rover through fluid or perhaps along the surface of a planetary body.
Power Beneath the Ice
This is the first time I have encountered locomotion based on electromagnetic power scavenging, with accompanying reliance on soft robotic structures that could change the way we look at designing probes that will operate in ocean environments like that on Europa. It’s interesting to take this one step further, as the proposal itself notes, and remember that a rover inspired by biology may here point toward astrobiology, in that electromagnetic energy is considered to be a possible source of energy for any native life under Europa’s ice.
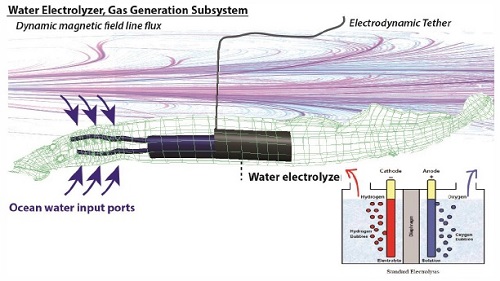
Image: Water electrolyzer and gas generation subsystem. Credit: Mason Peck, Robert Shepherd.
We know from experience in Earth orbit that tethers work, a result of the fact that a conductor moving through a magnetic field experiences an induced current. The power available at Jupiter gives us interesting options:
In Jupiter’s orbit, where the magnetic field can be up to 10,000 times more powerful and the ionosphere denser than Earth’s, the power can be even higher. A NASA/MSFC study characterized the power available for an EDT [electrodynamic tether] near Jupiter. The authors report that at least 1W would be available in Europa’s orbit but did not consider the much higher conductivity of the ocean or whatever tenuous atmosphere may exist near the surface.
Because higher conductivity produces greater current, the authors argue that far more power should be available on Europa, and that tethers no more than meters long should be sufficient to power the rover. According to the NIAC proposal, one end of the tether would be attached to the rover’s power systems while the other would be kept above the rover by a gas-filled balloon to maintain the necessary configuration as the rover conducted operations, and to ensure a predictable level of current. The tether itself also serves as an antenna to relay science data (possibly through an umbilical) to the surface. The proposed Phase I study would investigate tether configurations and the ability of an EDT to produce the power for transmission.
So we have energy harvested (or scavenged) by electrodynamic tethers being used to power up an electrolyzer that can split water into gaseous H2 and O2, an efficient way to use local resources in a domain where solar and perhaps nuclear power would be unusable (remember in relation to nuclear options that NASA has cancelled development of the Advanced Stirling Radioisotope Generator – ASRG – technologies, although some testing at NASA Glenn is to continue). The gases produced by the electrolysis would then be stored for energy usage, tapped as a combustible fuel/oxidizer mixture, and as a pressurant.
A Natural Model for Locomotion
This last point deserves a second look. In previous work, Robert Shepherd has created pneumatically powered silicon-based robots that can move and navigate obstacles, using onboard air compressors and lithium battery packs. Work at MIT has demonstrated a pneumatically powered swimming robot with a soft tail using onboard compressed CO2. Shepherd has also demonstrated the use of hydrogen combustion to increase the range and speed of soft robots, a model he and Peck propose for further study in the Europa concept, one that might be used both below the ice and on the surface.
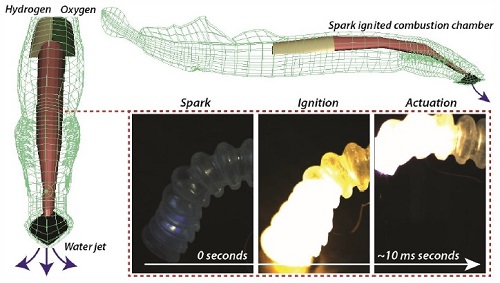
Image: Water jetting actuated by ignition of H2/O2 gas and subsequent shape change. Credit: Mason Peck, Robert Shepherd.
Here again the model from nature is instructive, for as the report notes, “[t]he design of the combustion powered hydro-jetting mechanism is analogous to the morphology of an octopus’ mantle cavity.” The report anticipates using jetting methods to allow the rover to range widely at long distances and also for precision operations over short distances. Peck and Shepherd are also hoping to study grasping operations that would be modeled on biology, using ‘an array of teeth-like grippers positioned around the water jet area (mouth) of the synthetic lamprey.’
This is fascinating work that offers us solutions for powering an underwater robot but also provides mechanisms for movement in this environment (one that we may find in other gas giant moons) through the use of a form of robotics that mimics the natural world. Solutions inspired by biology help us move beyond the use of solar arrays, nuclear power or batteries to keep our rover operational and to give it what would seem to be a robust and lengthy lifetime. I would say that getting soft robotics into the picture for future space operations is a very wise idea, certainly one that justifies continued study and investment as we look toward the outer planets.


If the Europa ocean is as conductive as they think it is an oscillating current could be used to directly drive the conducting fluid through a device with no need for gases to be produced, stored or ignited.
http://en.wikipedia.org/wiki/Magnetohydrodynamic_drive
The umbilical which would be quite long could also serve as the electrical generator via magnetic/electrical induction for the sub below. There may even be sufficient energy to aid the melting of the ice shell, if there is enough conductive ions in the ice to start with.
This is a must read for anyone who wants to see planetary and deep space exploration continue:
http://www.vox.com/2015/2/23/8052365/nasa-budget-europa
To quote:
The exploration of other worlds began in 1962 with the launch of the Mariner 2 space probe to Venus. Modern planetary science is a relatively new field, and resides at the intersection of multiple scientific disciplines to include astronomy, geology, oceanography, and atmospheric science, among others.
Historically, it has lacked the political and cultural influence of astronomy or astrophysics. Because of this, it has remained particularly susceptible to cuts and even cancellation.
For NASA, sending a person to Mars is simple. Dealing with Congress is hard.
That almost happened in 1981, when the White House proposed slashing NASA’s budget. The Reagan administration attempted to defund Galileo, the storied spacecraft that would eventually study the Jovian system. It also considered eliminating the Jet Propulsion Laboratory, the agency’s research and development center. The White House stopped taking calls from James Beggs, NASA’s administrator at the time.
A position paper issued by the Office of Management and Budget noted, “OMB staff believe that lower priority programs such as planetary exploration must be curtailed — even if they have been successful in the past.”
George Keyworth, Reagan’s science advisor, told the White House budget review board “the cut in planetary exploration represents an example of good management.”
Galileo was only saved at the last minute when Howard Baker, the Republican Senate Majority Leader, personally intervened, reaching out to the White House in support of the mission, eventually brokering a compromise to keep the planetary science alive.
The situation then was much more perilous than it is today. Planetary science is presently bolstered by its maturation over time as a field of study, and by its demonstrable successes. While NASA’s human exploration program retools for the exploration of Mars (or the moon, or an asteroid, depending on the whims of whomever is elected president), the robotic program is garnering impressive headlines.
The landing of Curiosity on Mars, for example, must surely rank as an engineering wonder of not one but two worlds. New Horizons’s flyby of Pluto is likely to be one of the biggest stories of 2015, and part of science textbooks forever.
The idea of using tethers for power also has a biological precedent – there are bacteria that can survive off little but a supply of current, and will form threads to carry current when the opportunity arises. So, nature being very efficient in filling niches like that, we may find we have to compete with any native life for the best spots!
new scientist article: http://www.newscientist.com/article/dn25894-meet-the-electric-life-forms-that-live-on-pure-energy.html?full=true
Paul, is there no link to this study/proposal? If it is or will be public, will it be posted somewhere? Thanks!
I will admit that it is a very creative idea to turn the very high EMF around Jupiter into a partial asset by using it to generate power. But it is also way down the rabbit hole of Rube Goldberg devices to introduce several new technologies in one package. The sequence of development for any ice moon or dwarf planet, including those much less challenging than Europa is as follows, each step requiring one or two decades:
1) A proper orbiter of the moon – not the gas giant, for a detailed reconnaissance and orbital sampling of plumes if possible. If the delta V or radiation hardening requirements for doing this are buried deep inside the “too hard” box, then dreaming about the subsequent steps is futile.
2) A lander to sample plume residues on the surface and for seismic studies
3) A penetrator of the ice layer to sample the liquid water mantle – if there are any surface locations where this could be an actual possibility. Recall that both US and Soviet attempts to drill down to the Mohorovi?i? discontinuity on our own planet failed.
The above steps would likely consume half a century or more. Only if interesting results are found in the preliminary steps would a powered underwater rover make any sense at all. Why would one want to spend billions to pointlessly navigate a mobile rover through a homogenous, sterile, dark, water mantle?
Regarding the less ambitious, but still very hard goal of drilling through the ice layer, the obvious approach would be to use an ice melting radionuclide-powered capsule with a data cable tethering it to the surface lander. The capsule need not be mobile, it can just hang in the water column and sample whatever drifts by. Perhaps future generations will do just this.
Ron S writes:
Ron, this is a proposal just submitted to NIAC — it’s not publicly available yet, but I’ll be glad to post the link when it becomes so.
I thought of powering a surface lander on Europa by having it fire, either by rocket or mortar, a fine conducting wire out several hundred meters after it landed. I never knew whether it would produce enough power to be practical, but from this paper, it looks like the idea has potential.
This just in (more places to explore possibly?) :
Could There Be Another Planet Behind the Sun?
by Fraser Cain on February 23, 2015
http://www.universetoday.com/119065/could-there-be-another-planet-behind-the-sun/
While I haven’t completely read the article, in fact, I’ve just barely scratched the surface, it does seem to be one of your top article so far, Paul.
Content aside, I’m still completely of the opinion that this trip to Europa is going to be a waste of valuable time and money! I think that the Saturnian system is far more liable to be productive, then Jupiter’s. Why? Simply because with Titan you have particular chemistries which will probably mirror what we may expect to find someday in deeper interstellar star systems. How many planets do we expect to find in which there is going to be (possibly) underground water environments ? Not too many. I would bet ! Finally I’d like to say that it seems the question as to whether or not there should be life on other planets may be less important than us PUTTING life on other planets. Mainly us.
The most interesting part is the use of the tether to generate power. This could be used for any type of rover or submarine. This strikes me as a possible small scale mission just to test the idea – generate power and/or use it to navigate in Jupiter space.
Biomimicry is all well and good, but best used for studying terrestrial aquatic organisms so as not to scare them in their habitats. I also suspect this is a technology that is looking for problems to solve. MIT has come up with a number of such devices that have been reported in the past, and each seems to be pitched at different uses, presumably to gain funding from the target organizations.
I personally would go with simple, failure proof designs first, and only consider such biomimicry designs when we have evidence of local macro organisms that need to be emulated. Europan macro-life, if it exists, may have body plans very different from terrestrial life.
A series of deep explosive penetrators is also worth considering. It’s crude but effective.
Re WIlliam:
I believe much of Mars’s ‘habitable’ epoch involved underground hydrothermal systems, Ceres is thought to have had a deep underground ocean, there’s at least one other jovian moon (can’t remember if its Callisto or Ganymeade) that is thought to have a sub ice ocean, Enceladus at Saturn for sure, several Kuiper belt objects, including Pluto’s moon Charon are suspected of harbouring sub ice oceans. IMHO it’s looking like they may be a far more common habitable environment than Earth like planets. That said , all else being equal I’d go after the Saturn system to: Enceladus is throwing its ocean into space for us to study, Titan could host all kinds of exotic chemistries and appears to have chemical energy imbalances that could power life-like chemical systems. Europa is a fine target, but may be a literal tough nut to crack if the ice is many km thick.
In extremely, extremely pertinent article that appeared on phy.org
(here it is in full detail)
Could ionized gas do A better job of sterilizing spacecraft?
Earth’s microbes are a hardy bunch. They can survive in extreme environments, such as inside hot springs at the bottom of the ocean. Some have even remained alive despite being exposed to the ultraviolet and ionizing radiation, extreme low temperatures, and vacuum of space.
Read more at: http://phys.org/news/2015-02-ionized-gas-job-sterilizing-spacecraft.html#jCp
This is why planetary protection advocates are so concerned about our exploration of other planets in the Solar System. Concerns about the contamination of the icy moon Europa, for example, prompted controllers of the Galileo mission to crash the spacecraft into Jupiter in 2003 so that microbes wouldn’t accidentally take seed on what could be a habitable moon.
Nevertheless, despite the best efforts of spacecraft cleaners, some microbes seem to survive conventional cleaning processes. This is why a new method is emerging that uses ionized gas to kill the microbes.
The method was presented at the European Astrobiology Meeting in October, in an effort led by Ralf Moeller, a space microbiologist at the German Aerospace Center (DLR) and Katharina Stapelmann, a plasma researcher at Ruhr-University Bochum in Germany.
“Plasma sterilization is a process not only compatible with modern spacecraft, but it also enables successful removal and inactivation of most resistant microbial species isolated in spacecraft assembly facilities,” wrote Moeller in an e-mail to Astrobiology Magazine.
“It is in the best interest of all spacefaring nations and research agencies, such as NASA and the European Space Agency (ESA), to characterize spacecraft-assembly inhibiting microorganisms thoroughly in order to assess their potential for forward contamination, and development of more effective reduction, cleaning, and sterilization technologies.”
Cleanroom menaces
When a NASA mission leaves Earth, it is designed to meet internationally accepted standards for planetary protection established by the Committee on Space Research (COSPAR). This is a committee that was created in 1958 by the International Council for Science, a non-governmental organization with members from most of the countries of the world.
The standards for missions vary depending on what the goal of a particular spacecraft, noted Moeller. Perhaps a spacecraft is put on a trajectory that won’t put it near the planet or moon’s environment. Other standards address how it is assembled in a “clean room” on Earth, and how it is sterilized.
Read more at: http://phys.org/news/2015-02-ionized-gas-job-sterilizing-spacecraft.html#jCp
For most Mars missions—including fairly recent ones, such as Europe’s Mars Express and NASA’s Mars Exploration Rovers (Spirit and Opportunity)—scientists examined the microbial diversity of organisms that were left over after these steps.
“In most cases, spore-forming bacteria constituted a dominant fraction of those microorganisms cultivated after heat-shock treatment,” Moeller said.
Read more at: http://phys.org/news/2015-02-ionized-gas-job-sterilizing-spacecraft.html#jCp
The standard protocol is to cook the microbes to 80 degrees Celsius (176 degrees Fahrenheit) for 15 minutes, he said. But there are highly resistant bacteria that can survive these treatments. In 2013, astrobiologists from Germany and the United States found a new bacterial variant called Tersicoccus phoenicis in two clean rooms on different continents.
“The presence of Tersicoccus phoenicis and other (spore- and non-spore forming) microbial species isolated from space craft assembly facilities exclusively in the cleanroom environments suggests selective adaptation and a significant role for these microorganisms in these environments,” Moeller noted.
“Microbes residing in the clean rooms during the spacecraft assembly process could gain access to a spacecraft, and possibly survive en route to extraterrestrial systems.”
Plasma purging
Last year, the researchers presented a newer form of sterilization at the European Astrobiology Meeting. The method involves using plasma—an ionized gas—at low pressure on the spacecraft.
“The method is very fast. Full spore inactivation of 100 million of bacterial spores was achieved in five minutes, even with spores of Bacillus pumilus SAFR-032, a space craft assembly facility isolate, which encounters the highest resistance to UV radiation and further sterilization methods,” wrote Stapelmann in the same e-mail.
There are other benefits to using plasma. The method doesn’t require using toxic or possibly cancer-causing substances such as ethylene oxide; it can be used in small doses; and it appears to be effective against spores from bacteria, fungi and prions (an infectious kind of protein).
“So far, the method is not used for spacecraft in development yet. Another method based on plasma but operated under atmospheric pressure is planned to be used on the International Space Station, if a recent proposal is accepted,” Stapelmann said.
Stapelmann’s and Moeller’s method may take some time to gain acceptance, given that there are already established procedures in place. The current methods of sterilizing surfaces in general (not spacecraft) involve high pressure, high temperature, and radiation through ultraviolet or gamma rays, Moeller pointed out. There are drawbacks to these methods, namely they can damage the underlying material, leave residues and create microbial resistances.
Read more at: http://phys.org/news/2015-02-ionized-gas-job-sterilizing-spacecraft.html#jCp
On spacecraft, there are only two accepted methods so far: dry heat (cooking the surface at 111.7 degrees Celsius, or 233 degrees Fahrenheit for 30 hours) or using hydrogen peroxide.
“Both methods, either through elevated temperatures or aggressive chemical reaction, are likely to introduce damage to advanced materials, such as electronics and other heat-sensitive equipment,” Moeller said. “Plasma sterilization is emerging as an alternative to commonly used sterilization techniques, due to many advantages. It’s cost-effective, fast, efficient, and safe in terms of thermal, chemical, or irradiation damage.”
Applications beyond space
Moeller and Stapelmann are part of a growing community looking at plasma for spacecraft sterilization. Research on using plasma sterilization of Planetary Protection purposes includes a January 2014 article in the journal Planetary and Space Science called “Cold atmospheric plasma – A new technology for spacecraft component decontamination,” led by Satoshi Shimizu at the Max Planck Institute for Extraterrestrial Physics in Garching, Germany. In their study, Shimizu et. al. are using solely the indirect effects of plasma, such as long-living reactive oxygen species.
While both methods are based on sterilizing with plasma, Stapelmann said, they propose using it in direct contact with the spores. The reported results for Stapelmann and Moeller’s method are an 8-logarithmic reduction of bacterial spores in five minutes, as opposed to a 5-6 log reduction of spores in 90 minutes with Shimizu et. al.
Read more at: http://phys.org/news/2015-02-ionized-gas-job-sterilizing-spacecraft.html#jCp
Stapelmann argues that their sterilization process—which relies on more direct contact with the spacecraft—is more efficient than Shimizu’s, as it kills more spores in a shorter treatment time. However, the treatment is harsh on electronics because the electronics are exposed directly to the electric field of the plasma, so Shimizu’s treatment would be preferable to Stapelmann’s.
Still, Stapelmann said their methods could use improvement as it is considered for use on spacecraft. In general, it is hard to treat a spacecraft because it is small and tends to have metal jutting out in odd ways. Also, low-pressure plasma systems require plasma chambers and vacuum pumps to get the job done, which can add some cost to the project. For using plasma sterilization on the ISS, an atmospheric-pressure plasma is planned, reducing the costs and the footprint of the system.
Beyond space exploration, Stapelmann points out that there are other uses as well.
“The plasma sterilization system was initially built for the sterilization of medical instruments. Our group has a lot of experience with low-pressure plasma sterilization systems. A first commercial plasma sterilization system was developed and built in cooperation with our institute.”
Explore further: Space Station research shows that hardy little space travelers could colonize Mars
More information: Denis, B., Steves, S., Semmler, E., Bibinov, N., Novak, W. and Awakowicz, P. (2012), “Plasma Sterilization of Pharmaceutical Products: From Basics to Production.” Plasma Processes Polym., 9: 619–629. doi: 10.1002/ppap.201100211
Satoshi Shimizu, Simon Barczyk, Petra Rettberg, Tetsuji Shimizu, Tobias Klaempfl, Julia L. Zimmermann, Till Hoeschen, Christian Linsmeier, Peter Weber, Gregor E. Morfill, Hubertus M. Thomas, “Cold atmospheric plasma – A new technology for spacecraft component decontamination,” Planetary and Space Science, Volume 90, January 2014,
Read more at: http://phys.org/news/2015-02-ionized-gas-job-sterilizing-spacecraft.html#jCp
New life for New Frontiers
While discussions about the NASA planetary science budget have focused on the inclusion of a Europa mission and possible termination of existing missions, the budget also supports the start of another mid-sized New Frontiers mission. Jason Callahan explains why a new New Frontiers mission is so important.
Monday, February 23, 2015
http://www.thespacereview.com/article/2701/1
Scientists Debate How to Search for Life on Europa in New Mission
By Paul Scott Anderson
Jupiter’s moon Europa, with its subsurface ocean, is considered by many to be the best place in the Solar System to search for extraterrestrial life. With NASA now committing itself to a new mission sometime in the 2020s, the focus is turning to what would be the best strategy for looking for any life which may be there.
Over 200 scientists and engineers met at NASA’s Ames Research Center in Mountain View, Calif., last week for a workshop called the The Potential for Finding Life in a Europa Plume to do just that.
As NASA science administrator John Grunsfeld told the meeting: “We’re going to do a Europa mission. If there’s something trapped in that water, and we potentially have the opportunity to see it, it could be transformative.”
Full article here:
http://www.americaspace.com/?p=77640
I am wondering if we ever need to go into the ocean below when, if there is life, we could test the numerous ice cracks which would be much easier to do.
@Dave Moore February 23, 2015 at 16:54
“… it looks like the idea has potential.”
I see what you did there Dave ;)
So, the tether could be supported vertically by a small balloon to get the most from the magnetic field alignment for a submarine-rover. But what would be the required orientation of any tethers for a surface-rover? A balloon would be useless in an exosphere (?) so could they be draped over the surface and still work as Dave posited? Could the tether be shortened enough to become something akin to a glorified aerial (triangular tip flag optional) and still work?
Should life have started in Europa’s ocean it may well have exploited this free magnetic energy the same way plants exploit free energy from sunlight; one could imagine Europa being completely choked with kelp-like “plants” growing to harness magnetism instead, and associated herbivores and carnivores to complete a full ecosystem…
@Malcolm RF March 4, 2015 at 16:26
‘Should life have started in Europa’s ocean it may well have exploited this free magnetic energy the same way plants exploit free energy from sunlight; one could imagine Europa being completely choked with kelp-like “plants” growing to harness magnetism instead, and associated herbivores and carnivores to complete a full ecosystem…’
Maybe, maybe not but there is certainly a lot of energy available at around I think 317 GW but it is spread out thinly.
Here is an article about the currents/voltages/energy that could be induced in the Europa ocean or cracks, it is a bit dated though.
https://archive.org/stream/nasa_techdoc_19870004782/19870004782#page/n15/mode/2up
If we ever land on Jupiter’s moons energy will not be problem.
Can a proper exploration of Europa, especially one designed to look for native life forms, be done for under one billion dollars?
http://www.planetary.org/blogs/casey-dreier/2014/0305-nasa-wants-europa-on-the-cheap.html
All I can say at this point is, NASA tried to explore Mars robotically on the cheap in the 1990s and the results were three lost probes which returned little to no data.
Does a lack of continually active water plumes on Europa mean bad news for the existence of any native life forms there?
http://www.space.com/29325-europa-water-plume-bad-for-life.html?hootPostID=5cec51085b5b023dcc4510508aa417eb
However this is an alien moon with a subsurface global ocean holding twice the amount of liquid water than Earth does, so let us explore it:
http://www.scientificamerican.com/article/it-s-time-to-go-to-europa/
Europa Report: A Report
Lunar and Planetary Institute
Published on May 7, 2015
Planetary scientist Dr. Britney Schmidt of the Georgia Institute of Technology discusses the accuracies and inaccuracies of the science and potential exploration of Europa as portrayed in the 2013 movie “Europa Report.”
Schmidt uses specific clips from the movie to illustrate her points. This presentation was part of the Lunar and Planetary Institute’s 2014–2015 Cosmic Exploration Speaker Series — “Science” on the Silver Screen.
NOTE: Due to copyright law, the movie clips do not appear in this recording. Instead, they have been replaced with a screen showing the beginning and ending time of each clip that is discussed.
https://www.youtube.com/watch?v=Wc2KPXq2IUo&index=1&list=PLQ7WzZtg-qMBZc4zyogBEG7UZZMp9pZ81
Stronger words of support for a Europa lander:
http://blog.chron.com/sciguy/2015/05/a-europa-lander-is-possible-jpl-scientists-say-and-congress-appears-likely-to-support-it/#21279101=0
This project should be a given, if we were a more sophisticated society.
To quote:
NASA is in the beginning stages of planning an orbital mission to Europa, called the “Europa Clipper” because it will fly down to within about 25 kilometers of the moon’s surface and then, in an elliptical orbit fly back out to escape the harsh radiation environment near Europa for most of the time.
This mission will cost about $2 billion and launch as early as 2022 on an SLS rocket.
However NASA asked JPL’s scientists and engineers to look at the possibility of attaching a lander to the Clipper, which Culberson has encouraged. The top scientists discussed their preliminary results with him this week.
They found that a “hard” lander could crash into the surface of Europa at about 20 mph, and do some good science. It would weigh about 100 kg and add approximately $700 million to the Clipper mission.
A “soft” lander, hitting at less than 5 mph, could carry a 300-kg payload that would do more science. It could sample the surface, do mass spectroscopy, and carry instruments such as a microscope and imaging camera. It would have the best chance of assessing whether life might exist in the oceans beneath the ice.
MAY 12, 2015
NASA Research Reveals Europa’s Mystery Dark Material Could Be Sea Salt
NASA laboratory experiments suggest the dark material coating some geological features of Jupiter’s moon Europa is likely sea salt from a subsurface ocean, discolored by exposure to radiation. The presence of sea salt on Europa’s surface suggests the ocean is interacting with its rocky seafloor — an important consideration in determining whether the icy moon could support life.
The study is accepted for publication in the journal Geophysical Research Letters and is available online.
“We have many questions about Europa, the most important and most difficult to answer being is there life? Research like this is important because it focuses on questions we can definitively answer, like whether or not Europa is inhabitable,” said Curt Niebur, Outer Planets Program scientist at NASA Headquarters in Washington. “Once we have those answers, we can tackle the bigger question about life in the ocean beneath Europa’s ice shell.”
For more than a decade, scientists have wondered about the nature of the dark material that coats long, linear fractures and other relatively young geological features on Europa’s surface. Its association with young terrains suggests the material has erupted from within Europa, but with limited data available, the material’s chemical composition has remained elusive.
“If it’s just salt from the ocean below, that would be a simple and elegant solution for what the dark, mysterious material is,” said research lead Kevin Hand, a planetary scientist at NASA’s Jet Propulsion Laboratory in Pasadena, California.
Full article here:
http://www.jpl.nasa.gov/news/news.php?release=2015-166&rn=news.xml&rst=4586
I posted the following over at NBF. Now amended.
Incorporating the tether method of power generation into the probe described below would be possible, as a diver probe would need an antenna for data transfer in any case. However, a lesser need for power may allow for a lighter tether, saving weight.
“There is a simpler way to harvest energy on the spot. Use gravity.
I assume the probe will be operating at differing depths, so, using a bladder system would let the probe rise and fall as the bladder is expanded and contracted. By using fin-wings, a simple torpedo shaped probe could “glide” to the side of a direct line of descent and, on bladder inflation, the same fin-wing system can glide the probe off of center of a direct line of ascent.
This would allow for great distances to be traveled without any more energy needed than to contract/expand the bladder and operate the wing-fins. Some of the needed energy could be produced by a trailing propeller generator or compressor [or, the tether method described in this article], and the use of piezoelectric devices integrated into some sort of undulating ribbon, also in tow or attached to the sides of the probe.
The probe itself would be far simpler, with fewer parts to break and no fluid intake for electrolysis which avoids clogging by all the critters and beasties we hope to find.”
“Gravitational potential energy pulls the probe down, buoyancy lifts the probe back up.
Energy that’s needed for the bladder to be inflated/expanded comes from conversion of those two forces into electricity (or compressed gas) from the trailing prop and/or undulating piezoelectric ribbon.”
Keeping the probe at near neutral buoyancy means minimal power would be needed to change depth.
No exotic materials or manufacturing methods needed. A shorter development and construction period means a sooner and cheaper mission. Multiple simpler, smaller, cheaper probes would allow for more probes. The loss of one probe, then, would not be a mission ending event.
JUL 24, 2015 @ 8:00
Testing the Space-Bound Submarines That Will Explore Alien Oceans
The robots that will swim Europa’s seas are already at work in Alaska.
In the coming decades, we could send a manned mission to an asteroid, put a person on Mars, or construct a space station and telescope on the moon. But the most revolutionary discoveries could come from autonomous robots exploring underground oceans, hundreds of millions of miles from Earth.
“One of the biggest discoveries in my field is that the solar system is littered with oceans,” says Alan Stern, planetary scientist and principal investigator of the New Horizons mission. “The Earth is an oddball; it wears its oceans on the outside. The others have their oceans on the inside, below an insulating layer of ice.”
It is in these oceans that NASA’s ASTEP (Astrobiology Science and Technology for Exploring Planets) program hopes to discover extraterrestrial life. Jupiter’s moon Europa is the primary target, although other celestial bodies in our solar system, such as Jupiter’s moon Ganymede and Saturn’s moons Enceladus and Titan, could also harbor life.
Full article plus cool artwork here:
http://www.popularmechanics.com/space/deep-space/a16591/tunneling-into-the-solar-systems-subsurface-oceans-to-search-for-life/