With my own memories of the July 4, 1997 landing of Mars Pathfinder at Chryse Planitia as fresh as yesterday, it’s hard to believe that we are looking at the 20th anniversary of rover operations on the planet. But as the Curiosity rover continues its travels and we look toward the Mars 2020 rover mission, we’re also taking a much longer look ahead at the worlds where life may be more likely to be found, the icy moons of Jupiter and Saturn.
Ponder this: Testing at the Jet Propulsion Laboratory is showing that ice grains in conditions like we will encounter on places like Enceladus or Europa can behave like sand dunes. That means fine grains that could stall an improperly designed rover, leading NASA engineers to begin rethinking designs harking back to the early days of Moon exploration, lightweight commercial wheels attached to a flexible chassis, a system that has worked for a variety of missions but will need adjustment for future work. The rovers that use these systems will, in the case of moons like Europa, need serious attention to radiation hardening.
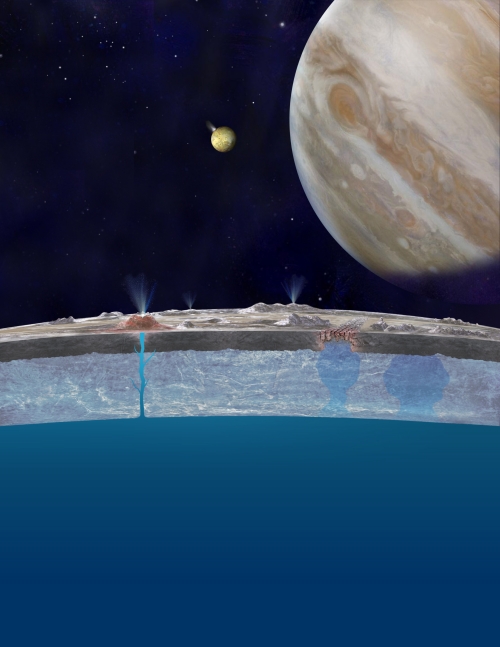
Image: Artist’s concept of Europa’s frozen surface. Credit: JPL-Caltech.
The project looking into extreme environments for these next generation rovers is called the Ocean Worlds Mobility and Sensing study, which is developing prototypes for sample acquisition on icy moons. Working tricky environments like Enceladus means coping with fissures that blow jets of material out into space. And Europa’s challenge goes far beyond Jupiter’s cascading radiation given the need to get through surface ice to sample the subsurface ocean. On Titan, we prepare for a possibly mushy ethane-rich surface.
“In the future, we want to answer the question of whether there’s life on the moons of the outer planets — on Europa, Enceladus and Titan,” says Tom Cwik, who leads JPL’s Space Technology Program. “We’re working with NASA Headquarters to identify the specific systems we need to build now, so that in 10 or 15 years, they could be ready for a spacecraft.”
The Europa work is particularly interesting given the question of astrobiology in the Europan ocean. The biggest problem for designers right now is that we have no certainty about the thickness of the surface ice, which could conceivably extend as deep as 20 kilometers. Richard Greenberg has argued in Unmasking Europa (Copernicus 2008) that the evidence of surface melt-through of Europan ice points to ice as thin as five kilometers. Whatever the case, so-called ‘melt probe’ designs are being scaled up for the challenge.
The JPL work on melt probes is led by Brian Wilcox, who has concluded that the thickness of Europan ice, in comparison with the Earth ices that conventional melt probes have coped with, demands an emphasis on heat efficiency. Wilcox is examining a vacuum-insulated capsule that uses a heat source like plutonium to keep its energy as it sinks into the ice. At one end, a rotating sawblade turns and cuts ever deeper, while pushing ice chips into the body of the probe, where they are melted and pumped out behind it.
The idea is that the water would be sampled in the midst of this process, with some being returned to the surface lander through pneumatic tubing. There it would be checked for biosignatures. And given concerns about possible contamination by Earthly life, Wilcox would heat the probe to almost 500° C during the cruise phase of the flight, thus killing off any residual organisms that may be hitching a ride from Earth.
“We think there are glacier-like ice flows deep within Europa’s frozen crust,” Wilcox said. “Those flows churn up material from the ocean down below. As this probe tunnels into the crust, it could be sampling waters that may contain biosignatures, if any exist.”
This JPL news release offers more, including work on a new generation of robotic arms that will out-reach our Mars rovers, which have never extended beyond about 2.5 meters from the base unit. JPL is looking at a robotic arm with a 10 meter extension, and is also considering a projectile launcher that can fire a sampling mechanism to distances of 50 meters. Having obtained the sample, the device would be reeled in by a tether.
These technologies are designed to be used along with an ice-gripping claw which could have a coring drill attached to it for taking surface samples at locations of interest. The drill would be able to reach about 20 centimeters below the surface ice. The ice claw itself would be deployed from a boom arm and would anchor itself with heated prongs that melt into the ice to secure the unit. It would then penetrate the ice with its drill bit to collect the needed sample.

Image: A robotic claw, one of several innovative tools developed at JPL for exploring icy, ocean worlds like Europa. Credit: NASA/JPL-Caltech.
The Ocean Worlds Mobility and Sensing site is sparse at the moment but it’s one you might want to keep an eye on as the effort continues. NASA is considering a second phase of the study that would be tapped as we work out the overall design of any icy moons lander.


Great to see this: “And given concerns about possible contamination by Earthly life, Wilcox would heat the probe to almost 500° C during the cruise phase of the flight, thus killing off any residual organisms that may be hitching a ride from Earth.”
There’s no reason why we can’t achieve 100% sterilization for probes to Europa if we use high temperature electronics – and RTGs can withstand heat sterilization too so the entire thing can be heat sterilized in one go. Just one comment. A probe could still contaminate Europa with dead life e.g. DNA or RNA or anything else that might in some way replicate. On the perhaps remote chance that it has shared ancestry with us, not impossible then GTAs also could introduce new capabilities to Europa life. So it may be that we also need to do something to remove the dead organics too. CO2 snow can help there as it removes the organics, as an extra step before or after the dry heat sterilization.
While it is early days, I trust that these ideas will be tested in the very cold conditions likely to be met on the icy moons. Even at our comparatively balmy poles, metals fracture and joints lock up. Just using a fast-rotating cutting blade just invites single point failure, making that a potentially risky approach.
These robots are also going to have to be highly autonomous given the time lags for control. Hopefully the technology for self driving vehicles will prove adaptable to these conditions, coupled with AI to select suitable sample collection locations and do the sampling with more than stereotypical behavior.
I was thinking the same thing about the need for autonomous functioning by the rovers. A signal from Earth will take 43 minutes to reach Europa and 79 minutes to reach Enceladus.
Personally, I would make surface probes to Ceres a priority over Europa probes. The surface of Ceres is thought to have a lot of geochemical similarities to Europa, and there are indications of organic material on Ceres. A study of Ceres first would help us focus our search on Europa.
I’m thinking of the Viking probes on Mars, which had a very expensive set of instruments to detect life on Mars, but produced inconclusive results.
Ocean sampling probes on Europa are going to be expensive. We need to know exactly what we are looking for to get most out of them.
I never quite understood why the makers of Viking did not do a proper analysis of the general makeup of the Martian surface so they could compare and contrast with any potential organics there.
They were going on assumptions that despite the harsh conditions there could still be something at least microbial in the Martian surface. Viking had a very impressive little $60 million biolab, but they made too many preconceived assumptions with it. Yes, I know one has to settle on some parameters, but the makers were still hoping for a Mars that wasn’t entirely dead from a much environmentally nicer era.
The Viking cameras were even designed to detect any surface motion from potential macroscopic Martian life forms. Again, I know they did not quite appreciate just how harsh Mars really is, but that is why I was asking why they didn’t properly analyze the general makeup of the Martian surface to begin with to differentiate between the organic and inorganic.
The ambiguities of the Viking results led to over two decades before another lander was sent to Mars and only now are we starting to get serious about looking for native life forms again.
We may not need to go to a very high temperature to melt the ice, Nanotubes have the effect of lowering the melting point quite a way thereby reducing heating mass requirements. Further if we land in a crevice not only do we get some protection from radiation, get lower down we also land in material that was last to freeze so is easier to melt, there is also more likely to be organics around these cracks.
Is there enough P-238 to explore Europa, Enceladus and Titan?
“Wilcox is examining a vacuum-insulated capsule that uses a heat source like plutonium to keep its energy as it sinks into the ice. At one end, a rotating sawblade turns and cuts ever deeper, while pushing ice chips into the body of the probe, where they are melted and pumped out behind it. The idea is that the water would be sampled in the midst of this process, with some being returned to the surface lander through pneumatic tubing.”
If you pump water through a 5km tube that is embedded in ice, I would imagine that that water would freeze before going very far.
Attempting a landing there: the case for a Europa lander
As NASA presses ahead with a mission to study Jupiter’s potentially habitable moon Europa from orbit, it’s also beginning planning for a follow-up lander mission. Jeff Foust reports on the state of both proposed missions, and the fiscal hurdles now facing the lander.
Monday, April 3, 2017
http://www.thespacereview.com/article/3208/1
It may be better to add a significant amount of Plutonium 239 and let it go slightly critical, water/ice is a very good neutron reflector and will allow a much smaller mass of Plutonium to be needed. I would also be interested if the refreezing liquid will expel ions that travel with the probe that would lower the melting point of the ice below it, a sort of self anti-freezing process. We could test this idea in a column of salted ice, I think it would work to a large degree.
Perhaps it would be appropriate to use for cutting ice laser with a fiber-optical system, like this: http://shvabe.com/press/news/shvabe-ispytaet-unikalnyy-sudovoy-lazer-v-arkhangelskoy-oblasti/.
There will be no such problems with the fixing apparatus (as “Rosetta”), less likelihood of jamming of the mechanisms. And also, along the way can carry out spectral analysis of evaporated ice to identify any interesting organics.
Quoting Paul Gilster from the main article:
“With my own memories of the July 4, 1997 landing of Mars Pathfinder at Chryse Planitia as fresh as yesterday, it’s hard to believe that we are looking at the 20th anniversary of rover operations on the planet.”
If you want to get really technical, the first rovers on the Red Planet were the little ones on the Soviet Mars 2 and 3 landers, which reached the planet’s surface in late 1971. Named Prop-M, they moved on skids and were attached to the main lander by a 15-meter tether. Their existence on the Soviet Mars landers was not publicly revealed to the West until 1990.
Sadly, we never got to find out if they worked. Mars 2 crashed into the planet, becoming at least the first human made vessel to “land” on Mars. At the time the probe’s makers declared that the lander had successfully placed the Soviet Coat of Arms on the Red Planet.
Mars 3 did land successfully on the fourth world from Sol in working order, but only about 90 seconds of transmissions were received along with the start of one very poor image that revealed nothing. Originally a global dust storm happening across Mars was blamed on the failure, but later analysis put the blame on a possible malfunction between the Mars 3 lander and orbiter bus communication relays.
The Mars 3 Prop-M may have worked because everything on these robotic landers functioned automatically upon touchdown and Mars 3 may have kept operating its programmed mission even after the loss of its signal. Future space archaeologists may be able to find out what happened to the little rover. At least we know where the historic probe is sitting on the Red Planet:
http://www.planetary.org/blogs/guest-blogs/2013/0412-how-we-searched-for-mars-3.html
So in conclusion: Yes, the first truly functioning rover on Mars which returned data and images was the one named Sojourner placed there in 1997 via Mars Pathfinder. However, the Soviet Union had sent the first rovers there in 1971.
There was also once a rumor that the Mars 6 and 7 landers sent to our celestial neighbor in 1974 actually carried two Lunakhod type rovers but that was soon determined to be false. Mars 6 ended up crashing on the planet but did take the first in situ readings of the Martian atmosphere during descent, where a misreading of argon caused some consternation about planetary formation theories for a bit. Mars 7 missed the entire globe and is now in solar orbit.
Fun fact: The Mars 7 orbital bus actually conducted some Optical SETI, but I have very little information on that project. Any details would be most welcome as this is likely the first deliberate SETI effort using an automated space probe.
If you want even more details about the early Soviet Mars exploration efforts, check out these two items:
https://www.youtube.com/watch?v=a-W-4X3zSoI
https://history.nasa.gov/monograph15.pdf
On the in-situ Detectability of Europa’s Water Vapour Plumes from a Flyby Mission
Press Release – Source: astro-ph.EP
Posted April 4, 2017 9:26 PM
http://astrobiology.com/2017/04/on-the-in-situ-detectability-of-europas-water-vapour-plumes-from-a-flyby-mission.html
We investigate the feasibility of detecting water molecules (H2O) and water ions (H20+) from the Europa plumes from a flyby mission. A Monte Carlo particle tracing method is used to simulate the trajectories of neutral particles under the influence of Europa’s gravity field and ionized particles under the influence of Jupiter’s magnetic field and the convectional electric field.
As an example mission case we investigate the detection of neutral and ionized molecules using the Particle Environment Package (PEP), which is part of the scientific payload of the future JUpiter ICy moon Explorer mission (JUICE). We consider plumes that have a mass flux that is three orders of magnitude lower than what has been inferred from recent Hubble observations (Roth et al., 2014a).
We demonstrate that the in-situ detection of H2O and H2O+ from these low mass flux plumes is possible by the instruments with large margins with respect to background and instrument noise. The signal to noise ratio for neutrals is up to ~5700 and ~33 for ions.
We also show that the geometry of the plume source, either a point source or 1000 km-long crack, does not influence the density distributions, and thus, their detectability. Furthermore, we discuss how to separate the plume-originating H2O and H2O+ from exospheric H2O and H2O+ . The separation depends strongly on knowledge of the density distribution of Europa’s exosphere.
Hans L.F. Huybrighs, Yoshifumi Futaana, Stanislav Barabash, Martin Wieser, Peter Wurz, Norbert Krupp, Karl-Heinz Glassmeier, Bert Vermeersen
(Submitted on 4 Apr 2017)
Subjects: Earth and Planetary Astrophysics (astro-ph.EP)
Journal reference: Icarus 2017
DOI: 10.1016/j.icarus.2016.10.026
Cite as: arXiv:1704.00912 [astro-ph.EP] (or arXiv:1704.00912v1 [astro-ph.EP] for this version)
Submission history
From: Hans Huybrighs
[v1] Tue, 4 Apr 2017 08:13:37 GMT (1429kb)
https://arxiv.org/abs/1704.00912