I don’t usually talk about spacecraft close to our own Sun, but exceptions invariably arise. Centauri Dreams took a close look at the Parker Solar Probe back in June, because its operations close to the Sun (within about 10 solar radii) have implications for how we might build the kind of spacecraft that can perform ‘sundiver’ maneuvers, approaching the Sun before deploying a solar sail for maximum effect (see Parker Solar Probe: Implications for Sundiver). Sundivers are one way to maximize acceleration for future interstellar missions.
And then there’s Venus, a planet I’ve written little about in these pages. The Automaton Rover for Extreme Environments (AREE) concept study now being funded by the NASA Innovative Advanced Concepts program is intriguing because it looks at spacecraft design from a fresh angle, actually one that harkens back to generations of mechanical devices that have had little part in space exploration. At least, until now. For while the environment on Venus challenges all our surface rover concepts, a hybrid mechanical/electronic design might save the day. The implications for other extreme environments in the outer system are quite interesting.
AREE grows out of ideas first proposed in 2015 by JPL engineer Jonathan Sauder, who drew on his knowledge of mechanical computers, the sort of calculating machines that use levers and gears instead of microchips. Think of Charles Babbage’s Difference Engine, which was designed in the 19th Century, or the Greek Antikythera mechanism, which could tell the Hellenistic world in ancient times about upcoming astronomical events like eclipses.
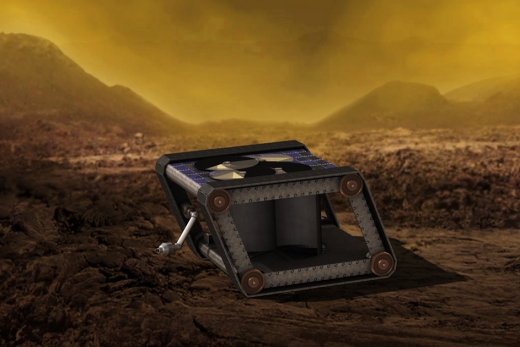
Image: AREE is a clockwork rover inspired by mechanical computers. A JPL team is studying how this kind of rover could explore extreme environments, like the surface of Venus. Credit: NASA/JPL-Caltech.
Sauder likes the idea of using analog technologies on Venus because electronics don’t last long under its extreme pressure and temperatures. If we can limit the use of electronics to the bare essentials and do the rest with analog techniques, we change the paradigm.
The power source? Wind turbines in the center of the rover, storing energy in a constant force spring. Tank treads, or something similar, would replace wheels, while communications would be handled by a rotating shutter placed in front of a bright radar target. The idea would be to turn the bright reflection on and off. Venus rover, meet the Royal Navy circa 1800 communicating with flags and signal lamps.
Build AREE right and you get long-duration in-situ mobility, a rover that might last on Venus’ hellish surface for a year or more (Soviet Veneras lasted for minutes or hours). Sauder considers it an automaton, ‘a mechanical device capable of performing a series of complex actions to achieve a specific result.’ I like the way AREE is described on this NIAC page:
[Automatons] have long been explored as art forms but remain unexplored for space applications. The automaton rover is designed to reduce requirements on electronics while requiring minimal human interaction and based on the subsumption architecture from robotics, where simple reactions of the rover lead to complex behavior. AREE combines steampunk with space exploration to enable science measurements unachievable with today’s space technology.
And the Phase 1 report notes: “High temperature electronics are incorporated where they have sufficient maturity and application, such as instrumentation.”
In other words, we are looking at a hybrid rover heavily dependent on mechanical methods but using electronics where needed. I hasten to add that this concept is maturing and may change substantially as a result of the Phase II work.
Consider the history of Venus exploration to see why alternate approaches are interesting. Venus’ surface reaches 460 degrees Celsius, hot enough to melt lead, while the surface pressures are high enough to crush the hull of a nuclear submarine at 90 bar. The Soviets attempted 14 landings in their Venera and Vega programs, nine of these being a success, but the sturdy probes lasted no more than two hours or so before being rendered inoperative.
“When you think of something as extreme as Venus, you want to think really out there,” said Evan Hilgemann, a JPL engineer working on high temperature designs for AREE. “It’s an environment we don’t know much about beyond what we’ve seen in Soviet-era images.”
The plan, then, is to bake mechanical prototypes of AREE to see how thermal expansion affects their moving parts. Phase 1 of the NIAC study compared mechanical rover technologies to electronics-based rovers using RTG cooling systems and designed to handle high temperatures, finding that current technologies were costly and not yet up to speed. The study also demonstrated the kind of passive signaling that would be deployed on AREE.
Phase II, now in progress, will set about finalizing the locomotion and signaling systems for the mechanical rover and creating a final rover design, a prototype that could perform initial testing. If AREE can work, it could change the game. One recent proposal for a Venus mission used a liquid gas cooling system that despite a price tag between $2 and $3 billion, could survive for less than a day on the surface. Sampling from multiple sites and developing longer-term weather data would be rendered impossible for this kind of device. AREE, with a sharply reduced electronics package, is a relatively low-cost mechanical alternative.
So we may one day be using levers and gears to produce calculations on this hellish world. We can only wonder what Charles Babbage might have made of the idea. Another reference is Pierre Jaquet-Droz, who along with his son produced mechanical automata in the 18th Century of extraordinary complexity. One of these, called The Writer, consisted of 6000 pieces, a mechanical boy with a primitive programmable memory who writes upon paper with real ink.
Mechanical computers experienced major growth in the early 1940s, and as Sauder’s Phase 1 report points out, were at their zenith by the 1940s. Nor were they simple affairs: They had gone from solving arithmetical problems to guiding bomb trajectories and aiming shipboard guns, taking atmospheric conditions into account. Sauder points to the Globus mechanical computer, an automaton that provided trajectory data for every Soviet launch until 2002. At the other end of the scale, mechanical watches and clocks can operate for decades — the oldest mechanical clock has been operated for 700 years. Throw in modern advances and we are now talking about a 10,000 year clock designed to function with minimal maintenance.
From the report:
Clever mechanisms can be combined with high temperature electronics to enable a platform that is more capable than either technology by itself. For example, one may consider simple addition. An electronic adder requires 576 transistors to combine two 16-bit numbers. To add numbers larger than 16 bits, multiple iterations through software would be required. However, a mechanical analog differential adder can solve the same problem using only 5 gears.
The goal, then, is to look critically at rover design to minimize the electronics package:
By finding these areas where mechanical solutions are relatively simple, the load on the computer can be reduced, thereby enabling a mission. Of course, a differential adder can only perform the adding operation, whereas a processor made up of many transistors can perform many other functions. But for an automaton, where the system is designed to carry out a specialized series of actions, this flexibility is not required.
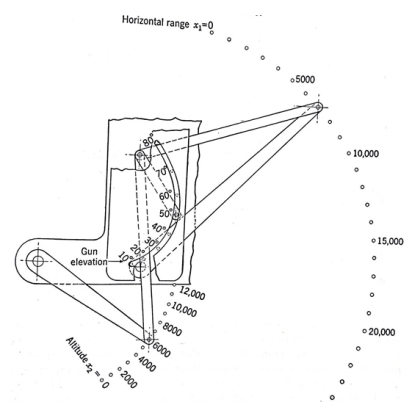
Image: Figure 9 from the Phase I report. A simple example of an analog mechanical computer with multiple inputs. Credit: Jonathan Sauder.
Note that the ability to make science measurements is what Sauder considers one of the greatest weaknesses of a purely mechanical system. We can think, then, of hybrid rovers in which electronics are reduced sharply in complexity by using mechanical analog systems where possible, but still deployed if necessary for high-resolution data. Back to the Phase I report:
Additional study is necessary to leverage the existing suite of high temperature electronics to make critical science measurements targeted towards the mission context. Furthermore, in the coming months it is expected several specific high temperature electronic technologies will be announced for further development through the Hot Tech program. The selection will define what scientific measurements will become the most relevant with soon to be released technology. Therefore, instead of focusing on instrument development, this [Phase 1] study focuses on developing a mobile platform for Venus and other extreme environments which could host various instrument payloads.
And now we move on to the Phase II study. A comeback for automata may prove useful not only on Venus but in any number of difficult environments where the data collection may be basic but persist for long periods of time. Operations near Jupiter, for example, produce significant radiation problems and demand extensive shielding for electronics, just as high pressure environments beneath planetary atmospheres (the interior of a gas giant) challenge the survivability of our best electronic probes. Venus could turn out to be an interesting test case for how we add mechanical methods into our toolkit of deep space exploration.
For more, see Sauder et al., “Automaton Rover for Extreme Environments,” NASA Innovative Advanced Concepts Phase 1 Final Report, available here.


I recall an old (the 1960’s?) episode of the British Scitech magazine “Tomorrow’s World” which showed models mechanical rovers for Venus. Wind turbines would drive the tracked wheels across the terrain. We now know from the experiment’s – Downwind faster than the wind – that such vehicles could, in principle, move faster than wind speed. More fancifully, there are Theo Jansen’s Strandbeests that walk using wind power alone. They could be the inspiration for a Bruce Pennington cover art.
Mechanical computers remind me of the instruction books in Stephenson’s “The Diamond Age”.
This all seems like Venus exploration in the steampunk age.
Old ideas coming to life with newer technology.
Clearly, the name of the hypothetical Venusian mechanical rover will have to be “Tik-Tok.”
…Just don’t put Harlan Ellison’s Ticktockman in charge of the Venus rover’s mission operations center–both the personnel and the rover would be in danger of having their cardioplates blanked when the funding for the primary mission ran out… :-)
576 transistors versus 5 mechanical gears: the gears add only one digit at a time, and they are only 5 if we ignore the surrounding mechanism for shifting digits in and out of the adder, and for handling carries.
Similarly, the circuitry that adds a binary digit at a time, if we ignore the shifter and the carries, needs only a few transistors.
Another thought: how will AREE send back pictures of the Venerian surface if it is limited to mechanical speeds? Will we have to wait a week to get the first photo?
The Soviets also considered using wind power to run their proposed Venerakhod rover in the 1980s:
http://photos.streamphoto.ru/3/b/a/139792cea6c16d847fda1c0539fd4ab3.jpg
These videos show the Soviet Venus rover in testing, but the wind blades are much smaller than in the still image above:
https://www.youtube.com/watch?v=8Z6lSS3hoMo
https://www.youtube.com/watch?v=552R7-aXEfM
I thought the best way to explore Venus’s surface was through a steam cycle balloon/lander.
A stubby glider would glide down to the surface. At 100 bars, your forward landing speed I can be very low. A tank of water would be used to cool the electronics, and the resulting steam would be feed into a balloon (steam being an excellent lifting gas in the Venusian atm.), which would lift the probe high into the Venusian atmosphere to cool the probe. Once the steam in the balloon envelope had condensed, the balloon would be stowed and probe could then glide down to a new landing site.
Power on the surface could be supplied by a steam turbine as the water turns to steam. Power could also be supplied by having a set of gas cylinders with a vacuum in them, and pressurizing them with the 100 bar surface pressure through a turbine.
As the probe lifts off, the cylinder valves would be shut, and the pressurized gas could be used to power the craft in the upper atmosphere.
What you have done with this is to turn you probe into a thermal cycle engine using the gradient in Venus’s atmosphere.
I believe the guy took an extra step back in time. Electronics can work OK-ish under hundreds of degrees Centigrade. The problem is the nonlinear parts, e.g. switches, or more specifically, the lack of the developed semiconductor technology capable of operating in this temp range.
But you know, vacuum tubes would work just OK.
Yes, and do check the report, where there is an interesting discussion of vacuum tubes and their capabilities in extreme conditions.
Early Soviet satellites used vacuum tubes. I am trying to find examples online.
Some, Paul, might consider your relative lack of coverage of Venus, and of missions there, to be male chauvinism… :-) But:
Speaking of thermionic valves (vacuum tubes), Venus’ heat could possibly be used to advantage in such electronic devices. The electron emitter in a tube–which is usually a filament or a non-incandescent resistance heater–could be a piece (a disc, say) of an appropriate metal or alloy, which would emit electrons (with a little help from a low-voltage input, to supply some excess electrons) mostly due to the ambient heating from the surrounding environment, and:
The grid(s) and plate could be made of metal(s) that would be less wont to emit electrons at the tube’s operating temperature (and/or they might even be cooled via a heat sink, which itself could be cooled via the Peltier effect–higher-power tubes, as in a radio transmitter, might employ these materials and techniques). Wherever possible, Venus landers and rovers (including flying ones) should be designed to “like” the Cytherean conditions, instead of using heroic–and very expensive!–insulation and cooling methods to keep relatively low-temperature electronics and mechanical systems within their extremely un-Venus-like operating temperature ranges (just as the large crucibles in metal smelting plants, which are designed to hold molten metal, are made of metal oxides, which aren’t bothered by such high temperatures).
A brilliant possible solution to a very difficult engineering problem. Electro-automata or something like that. A huge increase in survivability for a reasonable cost by the sounds of it.
Another thought.
How about high temperature photonics? The computer industry appears to be moving towards photonics in the next 20-30 years, so we may as well ride that technological wave.
The electronics should be possible even at 500 Celsius after all the operating temperature of 1 eV is around 11 000 K ! The issue is the heat dissipation and thermal diffusion of the junction parts which eventually leads to the destruction of the device. Perhaps diamond heat sinks and very slow electronic processes would be better.
It would be nice if there was an Mining/Petroleum application on Earth for specialized Venus hardware/eletronics. it would give impetus to
Developing special enviromental Suites.
(deep old silo specially reinforced) were we can probably develop much
longer lifespan venusian surface probes.
You make an interesting point, Rob (which is also relevant to Charlie’s post below, in which he questions the worth of developing a Venus rover). This beneficial technology transfer can go either way (from space use to industrial use on Earth, or vice-versa). Firstly:
The Pioneer Venus mission (Pioneer Venus 2, the Pioneer 13 Multiprobe spacecraft, specifically) required an extremely durable and heat-resistant sealing material for the atmospheric entry probes’ pressure vessel gaskets, and for gaskets to seal the diamond instrument windows of the Large Probe (also called the Sounder Probe). This requirement led to the development of GRAFOIL (see: http://www.google.com/search?source=hp&q=grafoil&oq=grafoil&gs_l=psy-ab.13..0l4.1093.2991.0.5582.7.7.0.0.0.0.112.712.2j5.7.0….0…1.1.64.psy-ab..0.7.712…0i131k1.aMuqYUCmEyM ), a graphite-based sealing material which has many industrial uses, including sealing the small windows of autoclaves in hospitals (this was one of its first uses on Earth), and:
Russia (and until 1991, the Soviet Union) has long been involved in deep subterranean exploration, for scientific and industrial purposes (as far back as the 1960s, they developed a small kerosene/oxygen rocket engine that was used to melt its way down through the rock). With today’s growing need–in the medical, electronics, and aerospace fields, especially–for more of the special metals that are rare on and near the Earth’s surface, but common in the deep crust and the mantle, such “extreme environment technologies” that would enable long-life Venus landers and rovers would also be useful for extracting ores from the Earth’s lower crust (the crust is only 3 miles thick in some places) and mantle. If similar technologies were developed for deep mining first, they–including very-high-temperature electronics and pressure-resistant materials and methods–would be applicable to long-lasting Venus landers and rovers.
Some models predict Venus surface crust instabilities resulting from internal heat build up. (no plates to dissipate heat)
If the surface becomes molted, are there rare elements
near or at the surface resulting from up welling currents?. (titanium,vanadium, and such) Maybe more concentrated than
on Mercury(another mining posibility, or Earth?
I had not thought of that, but I am glad that you did! Now that you’ve mentioned it, I recall reading that radar surveys of Venus (maybe from Venera 15 and 16, Magellan, and/or the Pioneer Venus Orbiter, or even from Earth; I don’t remember which) have indicated that it sometimes “snows” metal–tellurium–on the mountains. Because at least some of the rare Earth metals are relatively lightweight, they might very well rise to the surfaces of any “ponds” or “lakes” of molten metals on Venus’s surface. If so, such metals might be accessible by means of collectors “winched down” from balloons or airships floating at cooler levels in the Cytherean atmosphere.
There is currently some research into high temperature electronics already,
http://www.newelectronics.co.uk/electronics-technology/electronic-devices-at-extreme-temperatures/33379/
http://www.analog.com/en/analog-dialogue/articles/high-temperature-electronic-pose-design-challenges.html
http://www.extremetemperatureelectronics.com/tutorial1.html
Temperatures as high as 600 C !
This analog computer and machinery has a lot of nice features, but I wonder about the practicality of such an arrangement.
There are two questions concerning this whole enterprise that I do think need to be addressed, before this is undertaken.
The first is simply the question: Why ?? Why do this NOW when we have such a budgetary crisis, both within NASA and within the US in particular? When did be wiser to make planetary searches which might give far more definitive answers on questions which are more pressing? Such is life on Titan?
The second has to do with practicality of this entire proposal.
I only have to harken back to a simpler time and type of mechanism to ask about the entire feasibility. In the second world war, the Norden bomb sight was a analog device which presumably simplified the entire concept of strategic bombing. The device only delivered a limited accuracy and consequently necessitated large attacks.
The point here within all this is not to concern ourselves with some military application, but only to state that mechanical devices (and to some extent, digital ones) have inherent limitations which could vastly cripple a Venus mission. On Mars roving probes move very slowly and human intervention through satellite reconnaissance guides their every move. Venus won’t allow high resolution monitoring. The entire rover could come undone, should it end up having a wheel becomes stuck our tumble into a crevice. In analog computer will always be very limited.
I would love to see a glider/rocket/lander plane in the atmosphere. Perhaps the rocket component could be from stored CO2 when it is high in the atmosphere which is then heated by the lower atmosphere to propel it to the ground for sample pick ups.
A bridge to Venus
Planetary scientists who study Venus were disappointed by the outcome of NASA’s latest Discovery competition, but are doing more than placing all their bets on the ongoing New Frontiers program. Jeff Foust reports on how smallsats may provide a new option for sending missions to the planet.
Monday, December 11, 2017
http://www.thespacereview.com/article/3389/1
http://astrobiology.com/2018/01/venus-the-making-of-an-uninhabitable-world.html
Venus: The Making of an Uninhabitable World
Press Release – Source: astro-ph.EP
Posted January 11, 2018 at 7:56 PM
The goals of the astrobiology community are focused on developing a framework for the detection of biosignatures, or evidence thereof, on objects inside and outside of our solar system.
A fundamental aspect of understanding the limits of habitable environments and detectable signatures is the study of where the boundaries of such environments can occur.
Thus, the need to study the creation, evolution, and frequency of hostile environments for habitability is an integral part of the astrobiology story. These provide the opportunity to understand the bifurcation, between habitable and uninhabitable.
The archetype of such a planet is the Earth’s sister planet, Venus, and provides a unique opportunity to explore the processes that created a completely uninhabitable environment and thus define the conditions that can rule out bio-related signatures.
We advocate a continued comprehensive study of our sister planet, including models of early atmospheres, compositional abundances, and Venus-analog frequency analysis from current and future exoplanet data. Moreover, new missions to Venus to provide in-situ data are necessary.
Stephen R. Kane, Giada Arney, David Crisp, Shawn Domagal-Goldman, Lori S. Glaze, Colin Goldblatt, Adrian Lenardic, Cayman Unterborn, Michael J. Way
(Submitted on 9 Jan 2018)
Comments: 6 pages, 1 figure, white paper submitted in response to the solicitation of feedback for the “Astrobiology Science Strategy for the Search for Life in the Universe” by the National Academy of Sciences
Subjects: Earth and Planetary Astrophysics (astro-ph.EP)
Cite as: arXiv:1801.03146 [astro-ph.EP] (or arXiv:1801.03146v1 [astro-ph.EP] for this version)
Submission history
From: Stephen Kane
[v1] Tue, 9 Jan 2018 21:35:11 GMT (290kb)
https://arxiv.org/abs/1801.03146
Astrobiology
Before Launching Probes to Venus, NASA Had to Figure Out Exactly Where It Was
The uncertainties of early space navigation led a young JPL engineer to launch the field of radar astronomy.
By Mark Wolverton
Air & Space Magazine
February 2018
https://www.airspacemag.com/space/To-Venus-180967714/
https://apod.nasa.gov/apod/ap180130.html
Venus at Night in Infrared from Akatsuki
Image Credit: JAXA, ISAS, DARTS; Processing & Copyright: Damia Bouic
Explanation: Why is Venus so different from Earth? To help find out, Japan launched the robotic Akatsuki spacecraft which entered orbit around Venus late in 2015 after an unplanned five-year adventure around the inner Solar System. Even though Akatsuki was past its original planned lifetime, the spacecraft and instruments were operating so well that much of its original mission was reinstated.
Also known as the Venus Climate Orbiter, Akatsuki’s instruments investigated unknowns about Earth’s sister planet, including whether volcanoes are still active, whether lightning occurs in the dense atmosphere, and why wind speeds greatly exceed the planet’s rotation speed.
In the featured image taken by Akatsuki’s IR2 camera, Venus’s night side shows a jagged-edged equatorial band of high dark clouds absorbing infrared light from hotter layers deeper in Venus’ atmosphere. The bright orange and black stripe on the upper right is a false digital artifact that covers part of the much brighter day side of Venus.
Analyses of Akatsuki images and data has shown that Venus has equatorial jet similar to Earth’s jet stream.
Creating a hotspot for understanding Venus – the Planetary Spectroscopy Laboratory
February 7, 2018
Europlanet 2020 RI Press Release
Creating a hotspot for understanding Venus – the Planetary Spectroscopy Laboratory
A new simulation facility at the Planetary Spectroscopy Laboratory of the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) could help revolutionise our understanding of the hot, hidden surface of Venus. The Planetary Spectroscopy Laboratory (PSL) can analyse rock samples similar to those found on the surface of Venus at temperatures up to 1000 degrees Celsius, enabling researchers to interpret accurately data acquired by space missions and ground-based observations.
Although Venus is a similar size to Earth and sometimes called its twin planet, it is surrounded by a thick atmosphere of mainly carbon dioxide and clouds of sulphuric acid that make it very difficult to study the planet’s surface. Until recently, it was thought that a lander was needed to analyse the chemical composition of rocks on the ground.
“Landing on Venus is very challenging and no missions to the surface are currently planned,” said Dr Jörn Helbert, who has led the development of the chamber. “Lately, planetary scientists have taken advantage of ‘spectral windows’ in Venus’s atmosphere that are transparent to certain wavelengths of infrared light to gather data on the surface remotely. However, there have been challenges in interpreting this data, as we haven’t had the lab-based measurements needed to validate the results.”
Full article here:
https://www.europlanet-eu.org/creating-a-hotspot-for-understanding-venus-the-planetary-spectroscopy-laboratory/
To quote:
“The spectral databases that we are compiling with the PSL facility will enable researchers to revisit data from past missions, help plan for future missions and make new ground-based observations that will give us a much more accurate understanding of the surface of Venus,” said Dr Helbert. “Earth’s twin planet is a fascinating place that we still know relatively little about. This chamber will enable to study surface of Venus remotely in a way that so far we thought was only possible with a lander.”
A call for applications is now open for researchers to obtain up to a week’s free access to the PSL and other Europlanet laboratory and field facilities, funded by the European Commission European Union’s Horizon 2020 research and innovation programme under grant agreement No 654208. The closing date for applications is 1st March 2018.